



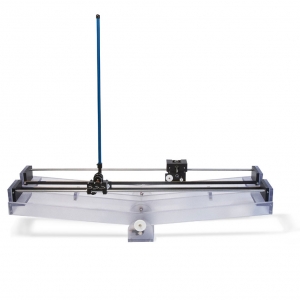
● 实验目标:本装置是一个小型的1/4汽车悬挂系统模型,适用于主动控制原理相关实验,使学生及相关人员掌握并了解当今汽车工业中悬挂系统的先进技术。类似的技术也被用于列车转向架,以改善列车的曲线通过性能和降低乘客感知的加速度。此外,本悬挂系统实验装置还可以用于如振动控制,神经网络控制等领域的研究。
● 实验功能:通过本装置试验,可以了解如下:
1 平稳度 – 由乘客从车身运动感觉到。在此可由安装于上板块的加速度计或者编码器来测得。
2 悬挂运动- 指车身和轮胎之间的相对位移是受限的运动。可以通过安装在绞盘上的编码器来测得。
3 路面操纵- 与路面和轮胎之间的接触力相关,通过轮胎形变来测得。轮胎的形变在这里由轮胎和路面之间的相对位移表示,可通过编码器测得。

● 特点
✔坚固机器结构部件
✔三个高分辨率编码器用于测量底部和顶部质量以及悬架挠度的位置
✔微型无刷直流电机连接主动悬架控制的绞盘
✔有刷直流电机连接到皮带驱动机构用于道路驱动
✔重量和弹簧刚度可调
✔加速度计测量用作传感器输入
✔模拟路面的响应式皮带传动机构
✔顶板加速计用于测量车身加速度
✔多色块区分(蓝色车身,红色车轮,银色路面)
✔限位开关及保护电路
✔系统模型和参数的完整文档
✔开放式体系结构
✔与MATLAB/Simulink和LabVIEW完全兼容
● 课题实验
✔双质量、弹簧、阻尼器系统分析
✔工业相关控制要求(乘坐舒适性、悬架行程、道路操纵性)
✔动态模型推导
✔状态空间表示
✔系统传输功能
✔开环系统分析
✔时域和频域开环和闭环系统辨识
✔全状态/双状态反馈LQR控制设计(带实时控制参数调整)
✔全状态/双状态反馈LQR控制器(带实时控制/观测器参数整定)
✔观察器设计
● 应用案例




 关注微信公众号
关注微信公众号