



● 实验目标:此实验装置是通过实验的方式展示控制的基本原理。可用于本科生、研究生课程所涉及的移动控制、编队控制、机器视觉等经典控制理论的实验研究;实现理论控制与实际控制各参数的比较,学生可加深对控制理论应用的认识和掌握。
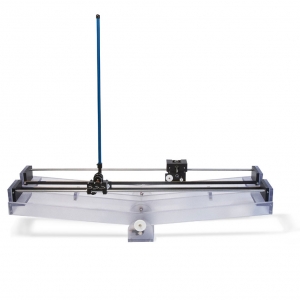
● 实验功能:移动控制实验装置(QBOT2 FOR QuaRC)作为研究地面自主移动控制、移动小车控制、编队控制、自主移动智能平台控制、移动视觉等相关控制理论知识的实验开发平台。在此基础上,还可以进行信息融合,智能交通等控制领域的实验研究。多个具有自主功能的移动控制实验装置之间可以进行相互通讯,主要研究的范围包括主从控制,编队控制,协调控制,多智能体系统等控制理论的研究。

● 特点
✔成本低,系统紧凑,无需组装
✔支持的第三方传感器包括数字(SPI、UART、I2C)和模拟传感器
✔用于定制传感器安装结构或承载的安装孔
✔可手动调节倾斜角度的摄像机
✔Linux低功耗CPU用于高级实时决策和任务执行
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 课题实验
✔差速器驱动运动学
✔正向和反向运动学
✔航位推算与里程定位
✔路径规划与智能避障
✔2D网格地图映射
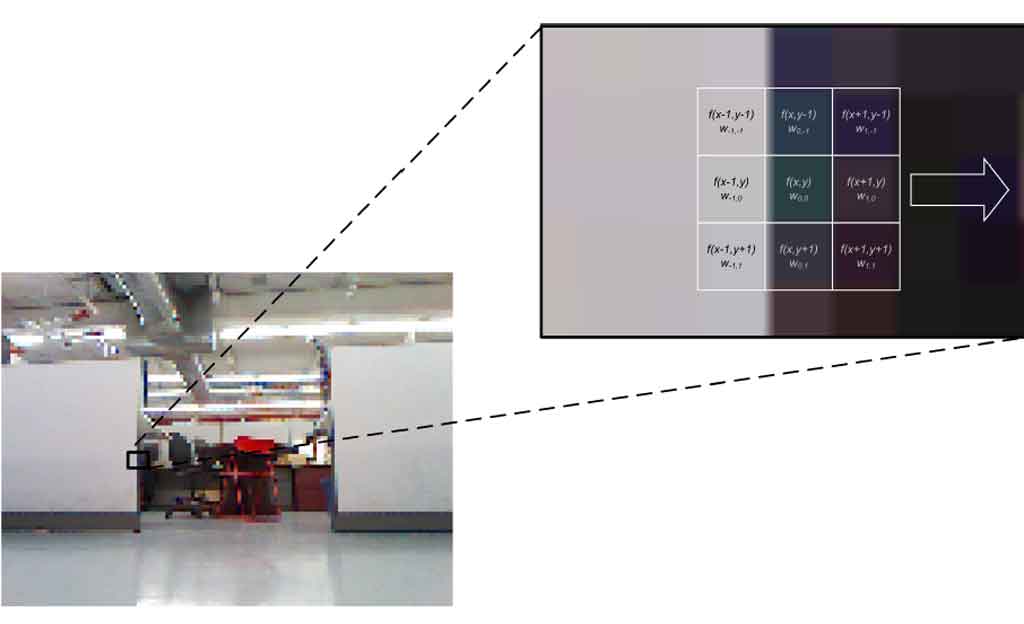
✔图像采集、处理与推理
✔定位与映射
✔移动机器人的高层控制体系架构
✔视觉导向车辆控制
● 应用案例



 关注微信公众号
关注微信公众号