



● 实验目标:该设备是引入与机器人和触觉相关的中级和高级控制概念和理论的一种经济高效且安全的方式。将触觉设备与实时控制软件和全面的第三方开发课程相结合,让学生可以轻松地将课程理论转化为实践经验。
● 实验功能:随附的实验课件使学生了解机器人的基本概念,例如正向和反向运动学建模,雅可比,PID控制和路径规划。课件还涵盖了更高级的触觉概念,例如力计算,碰撞检测和虚拟对象动力学。基于课件中提供的基于触觉的练习,学生可以快速创建基本的虚拟环境,并将其用作设计更复杂的多对象环境,多接触触觉的基础交互,力反馈,远程操作和协作触觉置。

● 特点
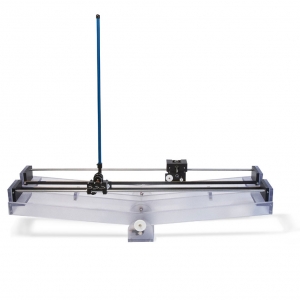
✔CE认证标准的触觉装置
✔六自由度位置感测
✔便携式设计可实现工作场所的灵活性
✔可移动手写笔与开关方便用户定制使用
✔支持自动工作空间校准
✔开放式结构设计方便用户设计并验证控制程序
✔提供MATLAB®/Simulink系统模型和参数
✔兼容MATLAB®/Simulink预置程序进行高度灵活的操作和控制
● 配套实验
✔正向运动学和D-H 参数
✔反向运动学
✔关节 PD 和 PID 控制
✔轨迹规划 (关节空间 vs. 任务空间)
✔雅可比推导与应用
✔各种力定律触觉渲染(力场、软硬接触等)
✔使用 3D Viewer 进行图形开发
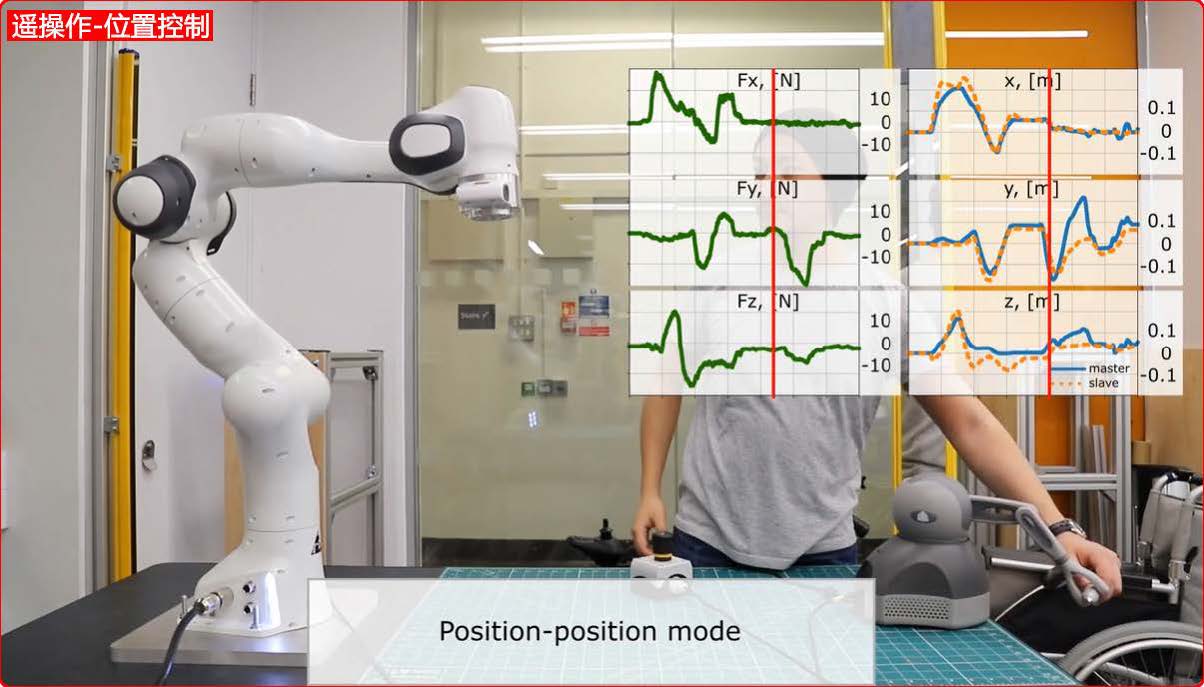
● 应用案例



 关注微信公众号
关注微信公众号