



● 实验目标:
- 增强沉浸感:通过精确的力反馈,让用户在虚拟环境中获得更真实的物体交互体验,从而提高沉浸感。
- 探索触觉感知与认知:研究用户对触觉反馈的认知反应和适应性,了解触觉反馈如何影响用户的感知体验。
- 推动虚拟训练应用:验证力反馈设备在复杂训练场景中的应用效果,如手术模拟、精密制造等高要求的虚拟环境。
- 优化触觉反馈技术:通过实验数据改进设备的反馈精度、灵敏度和响应速度,为后续产品优化提供技术支持。
● 实验功能:
- 高精度力反馈:Omega系列提供精细的多维度力反馈,可模拟物体的硬度、弹性和表面摩擦力等特性,让用户在虚拟环境中获得接近真实的触觉体验。
- 定制化触觉体验:支持根据不同场景需求设置反馈强度、模式和频率,满足用户在不同应用中的个性化需求。
- 实时数据记录与分析:具备实时记录用户触觉交互数据的功能,支持分析用户对不同触觉反馈的反应,为研究和系统优化提供依据。
- 多平台兼容:Omega系列能够适配多个虚拟平台和应用环境,如VR、AR和MR,为不同领域的虚拟互动提供支持
● 特点
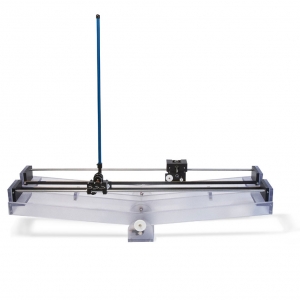
✔提供主动力和扭矩反馈,以及主动抓取
✔便携式设计可实现工作场所的灵活性
✔开放式结构设计方便用户设计并验证控制程序
✔提供MATLAB®/Simulink系统模型和参数
✔兼容MATLAB®/Simulink预置程序进行高度灵活的操作和控制
● 应用
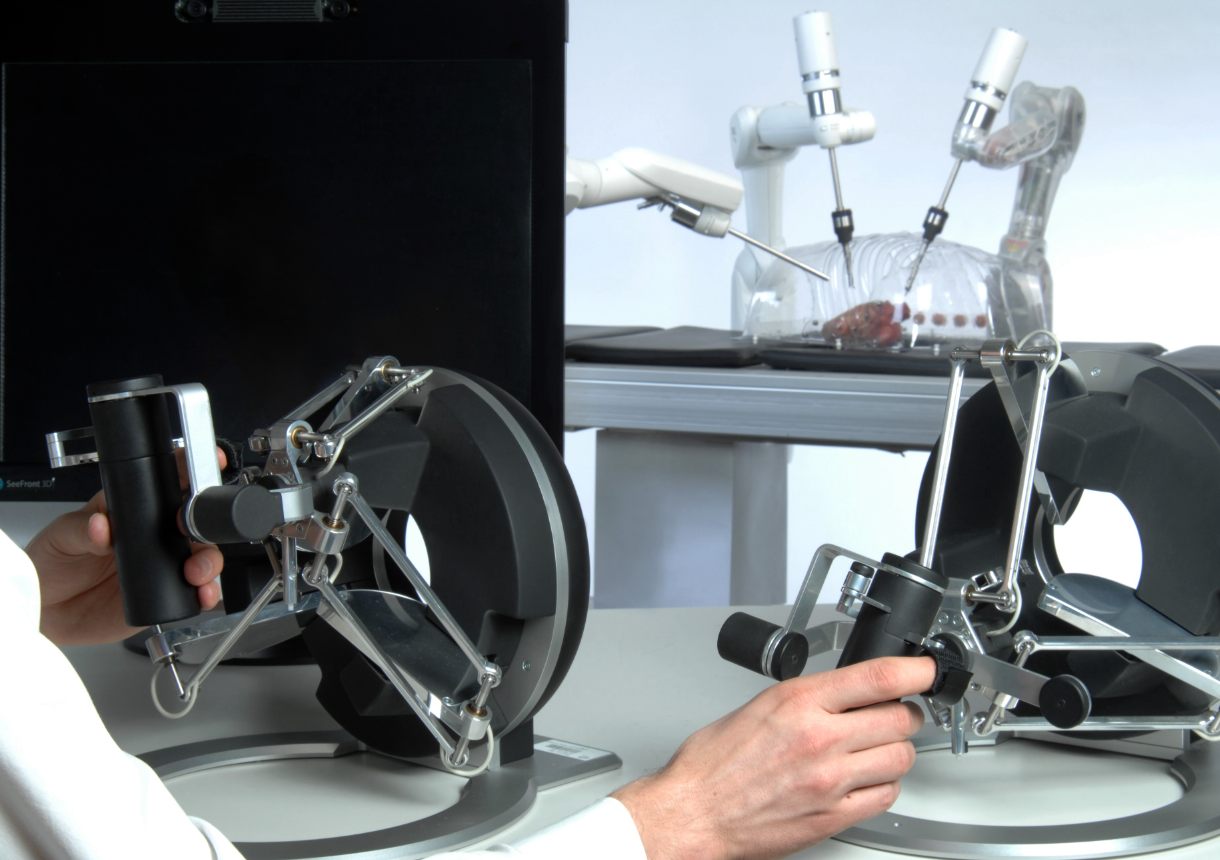
✔虚拟手术训练:Omega系列能够模拟复杂的生物组织触感和阻力,适用于外科医生手术练习,提高手术技能和精准度。
✔工程仿真与制造训练:可用于工业仿真中的精密操作训练,如装配、焊接等模拟,帮助工程人员在虚拟环境中练习复杂操作
✔康复训练:在康复领域,通过精确控制力反馈强度,Omega系列可帮助患者进行特定的触觉训练,支持肢体康复和肌肉重建
✔人机交互研究:在心理学和人机交互研究中,Omega系列可用来分析用户对不同触觉刺激的反应,支持触觉界面的设计和优化
● 应用案例



 关注微信公众号
关注微信公众号