



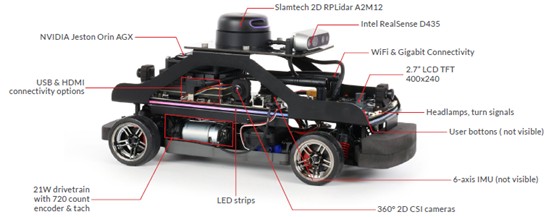
● 介绍:无人驾驶实验平台QCar2是一个专为高校实验室而设计的可高度扩展、配备多种传感器且功能强大的实验平台。可用于进行数据集成、地图绘制、导航、机器学习、人工智能和其他高级无人驾驶概念的研究学习。QCar2配备多种传感器,包括LIDAR、360度视觉传感器、深度传感器、IMU、编码器以及可扩展I/O口,可以实现对周围环境的准确测量。QCar2提供的开放式架构使得使用者可以研发自己的控制器。QCar2可为使用者提供多种语言开发环境,包括MATLAB®/Simulink®, Python™和ROS等。
● 第三方可扩展
✔ QUARC for Simulink
✔ Quanser APIs
✔ TensorFlow
✔ Python™ 2.7 / 3 & ROS 2
✔ CUDA®
✔ cuDNN
✔ TensorRT
✔ OpenCV
✔ VisionWorks®
✔ VPI™
✔ GStreamer
✔ Jetson Multimedia APIs
✔ 支持 GPU 的 Docker 容器
✔Quanser Stream API 用于进程间通信
✔模拟和虚拟训练环境(Gazebo 和 Quanser Interactive Labs )
✔视觉导向车辆控制
● 应用案例



 关注微信公众号
关注微信公众号