



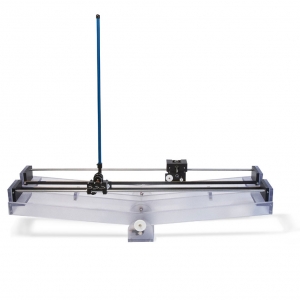
● 实验目标:学生可以学习现实世界中的机器人概念,如正向和反向运动学,以及末端执行器平面位置控制。
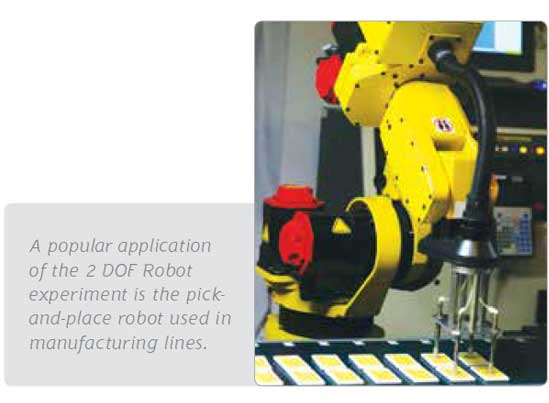
● 实验功能:二自由度机器人特别适合教学中级机器人原理。它可以扩展以允许二自由度倒立摆实验教学。二自由度机器人的应用通常是拾取和放置机器人用于生产线,如印刷电路板。

● 特点
✔高精度4连杆系统
✔轻松连接2自由度机器人模块到旋转伺服单元
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 配套实验
✔建模课题
-
- 传递函数表示
- 运动学
✔控制课题
-
- PD
● 应用案例
● 用户反馈



 关注微信公众号
关注微信公众号