



● 实验目标:学习机器人学原理和扭转动力学。学生会的了解扭转系统的建模和控制方法它是通过最小化振动量来实现的。
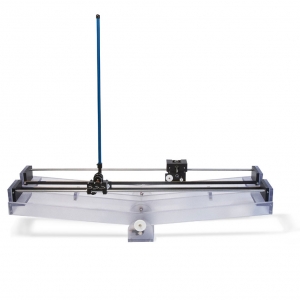
● 实验功能:扭转模块连接到旋转伺服单元可用于教学单自由度扭转动力学。添加一个或多个(最多七个)串联的扭转模块允许您扩展研究二自由度或多自由度的实验的复杂性-自由度扭转动力学。包括高传动比谐波传动的应用轻型传动轴可能具有关节灵活性所有这些都可以用这个系统。

● 特点
✔高分辨率编码器用于检测扭轴角度
✔可安装多个扭转模块进行多自由度扭转系统
✔可变盘位以实现不同的惯性
✔轻松连接扭转模块到旋转伺服单元
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB®/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 配套实验
✔建模课题
-
- 第一性原理推导(1 DOF Torsion)
- 拉格朗日导数 (2 DOF Torsion)
- 状态空间表示(1 and 2 DOF Torsion)
- 模型验证 (1 and 2 DOF Torsion)
- 参数预估 (1 and 2 DOF Torsion)
✔控制课题
-
- 线性二次调节器
- 振动控制
● 应用案例
● 用户反馈



 关注微信公众号
关注微信公众号