



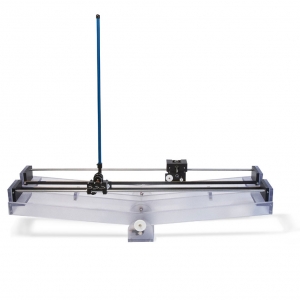
● 实验目标:旋转倒立摆模块为学生提供掌握经典倒立摆问题的动手机会。通过旋转或改变垂直杆来学习平衡底部的角度。这个实验装置使学生接触两种不同的环境不同的控制挑战:倒立摆(即Furuta
摆)和自举倒立摆。
● 实验功能:学生学习解决机械和航天工程中常见问题,特别是设计平衡垂直杆的控制器。通过旋转或改变底部的角度(倒置摆杆),并将摆杆向上摆动并保持在直立姿势。一个典型的应用是两轮驱动自平衡电动车。

● 特点
✔高精度铝合金结构件
✔高分辨率光学编码器,用于检测测杆和轴位置
✔轻松连接倒立摆模块到旋转伺服单元
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB®/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 配套实验
✔建模课题
-
- 状态空间表示
- 线性化
✔控制课题
-
- 混合控制
- 机电配置
- 基于能量的/非线性控制
● 应用案例

● 用户反馈



 关注微信公众号
关注微信公众号