



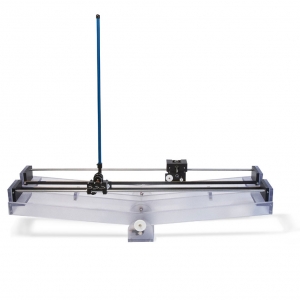
● 实验目标:帮助学生而设计的进行柔性链路控制实验。
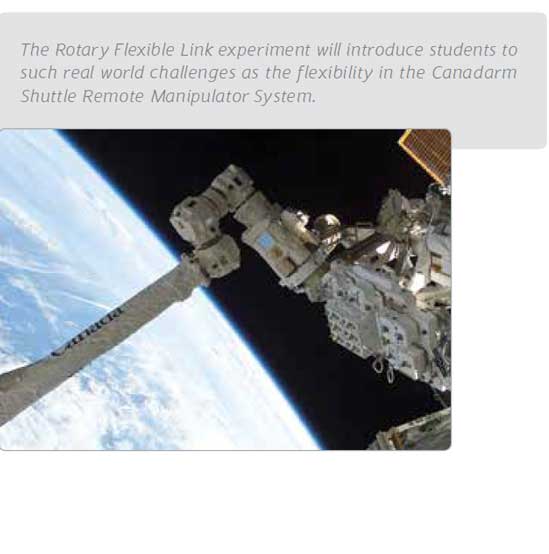
● 实验功能:本装置是研究振动分析与共振的理想设备,并模拟现实生活中的控制问题如在大型轻型结构中需要反馈控制来提高性能和灵活性。这个实验装置在建立机器人或宇宙飞船上的柔性连杆模型时也很有用。

● 特点
✔高精度铝合金结构件
✔高分辨率应变计检测柔性尺形变量
✔轻松连接柔性尺模块到旋转伺服单元
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB®/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 配套实验
✔建模课题
-
- 拉格朗日导数
- 状态空间表示
- 参数估计
- 模型验证
✔控制课题
-
- 线性二次调节器
- 振动控制
● 应用案例
● 用户反馈



 关注微信公众号
关注微信公众号